

Obstacle avoidance RC car
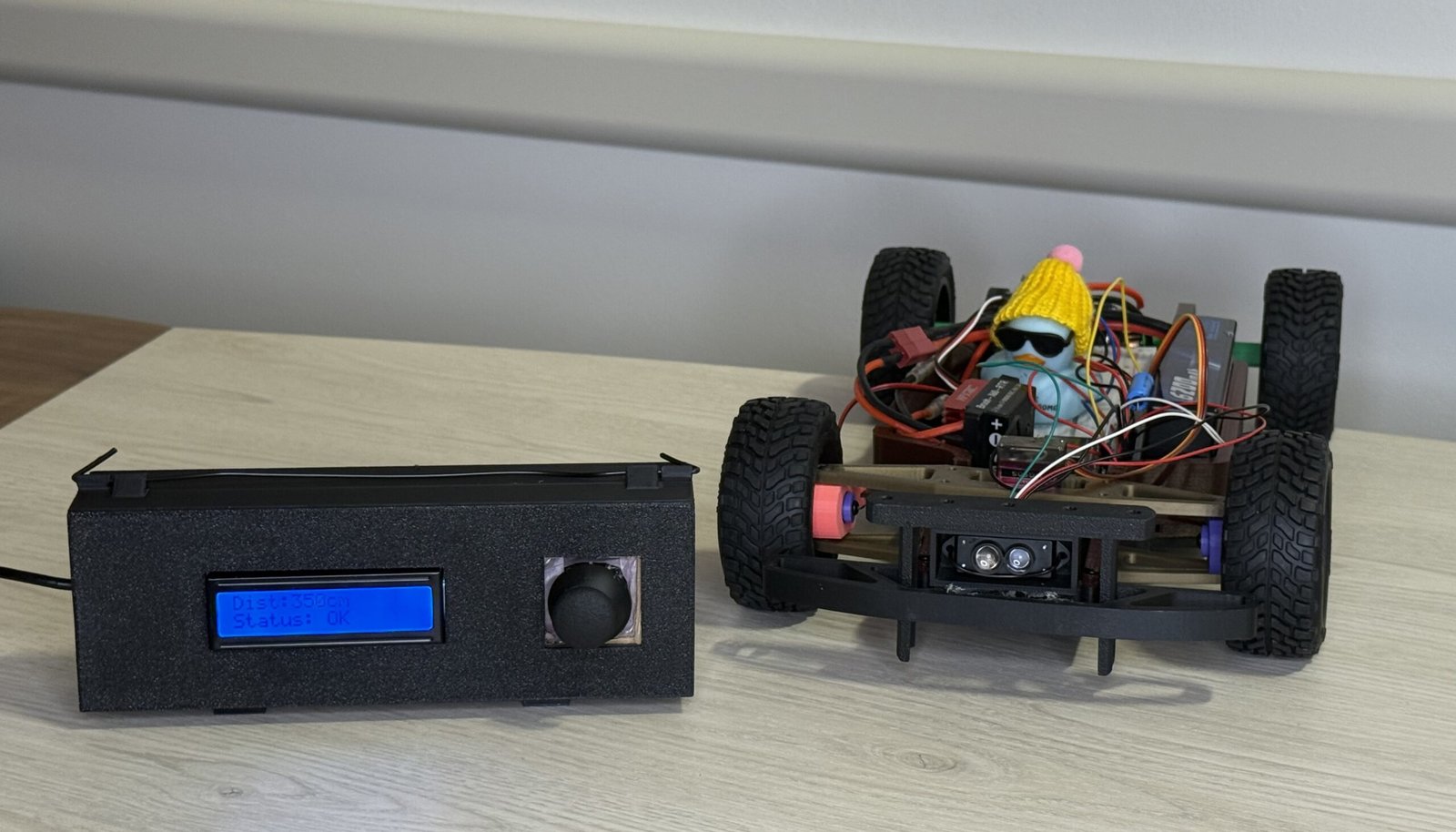
My RC car features LiDAR-based obstacle avoidance, smooth braking, wireless ESP-NOW communication, and live status feedback. I designed and built every part of the system, from the electronics and control logic to the overall vehicle integration. The remote sends commands to the car while the ESP32 continuously monitors LiDAR distance and automatically slows or brakes when an object is too close. The display indicates whether the system is safe or actively braking.
This project involved several challenges, including wiring issues, servo jitter, and LiDAR communication problems. Working through them strengthened my electronics and troubleshooting skills, and I’m proud of how far the build has progressed. In the video, the braking occurs automatically without me releasing the controls.
